Программное обеспечение HACOBEND 3D
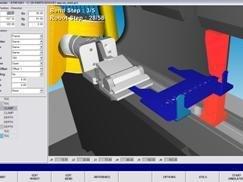


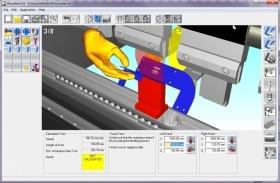

Контроллер Hacobend 3D является самым мощным программным обеспечением для автономной гибки, который используется для подготовки деталей изгиба. Он ведет оператора через процесс от создания детали, непосредственно от чертежа, до получения изгиба. НacoBend 3D имеет два модуля CAD3D и CAM, а так же данное программное обеспечение полностью интегрировано в HACO SOFT, также есть возможность использования трехмерных инструментов (фальцовки, специальные инструменты), динамическое отслеживание возможных соударений по конкретной модели пресса. Hacobend 3D позволяет полноценно спроектировать изделие из листа металла в трехмерном виде, рассчитать плоскую развертку с гибочными припусками и положение упорных блоков, а также проводить тесты на безопасность для выявления опасных ситуаций.
Программное обеспечение автоматически ищет все возможные последовательности изгиба в соответствии с характеристиками продукта, настройками машины, настройкой инструмента и многими другими предпочтениями. Возможна ручная настройка автоматически созданной последовательности, а также полное ручное определение последовательности изгиба. Все это поддерживается детальным 3D-моделированием виртуального прессового тормоза и продукта.